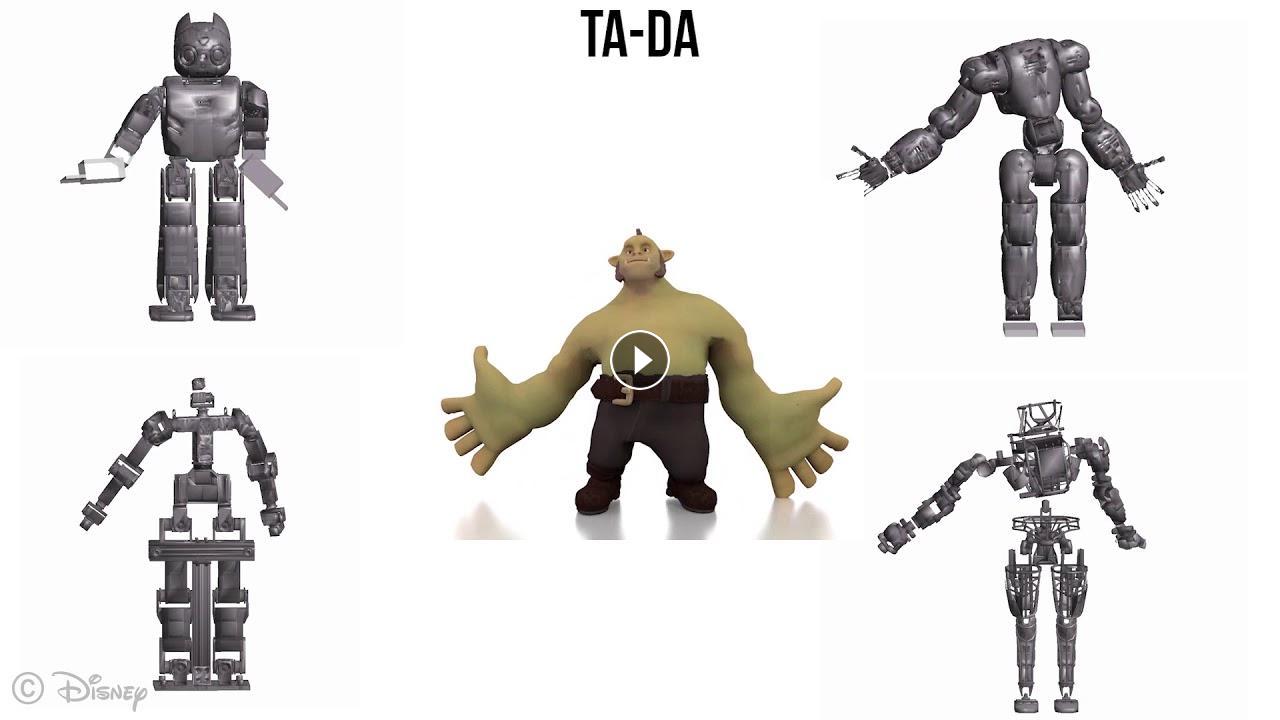
Imitation of the upper body motions of human demonstrators or animation characters to human-shaped robots is studied in this paper. We present a pipeline for motion retargeting by defining the joints of interest (JOI) of both the source skeleton and the target humanoid robot. To this end, we deploy an optimization-based motion transfer method utilizing link length modifications of the source skeleton and a task (Cartesian) space fine-tuning of JOI motion descriptors. To evaluate the effectiveness of the proposed pipeline, we use two different 3-D motion datasets from three human demonstrators and an Ogre animation character, Bork, and successfully transfer the motions to four different humanoid robots: DARwIn-OP, COmpliant HuMANoid Platform (COMAN), THORMANG, and Atlas. Furthermore, COMAN and THORMANG are actually controlled to show that the proposed method can be deployed to physical robots.
Link to publication page: https://projects.disneyresearch.com/pubproc/1259/
- Category
- CG VFX & Misc
Up Next
-
03:39

Just Dance 2026 gameplay - Born to be Alive (Stop Motion) — Inspira Stop Motion
-
02:07
Motion Design
-
01:11
MOTION
-
00:44
Motion Roid
-
00:26
Motion Trail | VFX
-
03:01
SURREALIST MOTION
-
00:14
motion graphics
-
00:48
MOTION TXT PHOTOS
-
01:12
Motion in Frame
-
01:00
Showreel Motion
-
07:57

Scavengers